Atualizado 28 de março de 2026
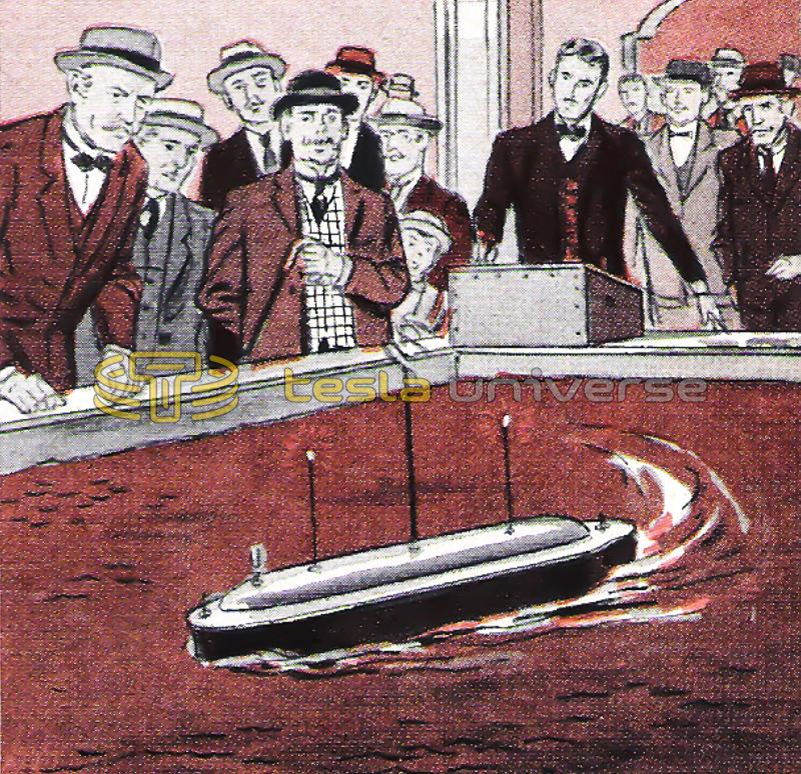
O barco rádio controlado inventado por Nikola Tesla foi revelado em 1898, sob a Carta Patente nos Estados Unidos nº 613.809.
No ano seguinte, ele demonstrou Publica ao Clube Comercial de Chicago que conseguia dirigir um barco sem tocá-lo, fazendo-o girar, acelerar e piscar suas luzes sempre que enviasse sinais para isto.
Ao final segue o Texto na Integra da Carta Patente nº 613.809, de 1898, do Barco controlado remoto sem fio de Nicola Tesla, Alguns especialistas consideram o circuito do barco um progenitor da lógica AND básica usada nos computadores modernos.
Análise Audiovisual
Vídeo 1 : Nikola Tesla Projetou Veículo Aéreo Precursor dos Vtols – 1921
Vídeo 2 : Passando Através -Passing Through. Nikola Tesla, Franklin Institute,1893. Leg Pt Br | Nature & Space
🔭 Siga Nature & Space no Google News 📨

LEIA MAIS
NIKOLA TESLA DETALHOU SEU MÉTODO MENTAL EM ENTREVISTA
USINA SOLAR ESPACIAL DE 22 GW SUPRIRÁ 50 MILHÕES DE CARROS
Compartilhar é Livre. Ajude-nos Citando o Link Deste Artigo!
Tesla declarou que aboliria a guerra com seu barco a controle remoto
No Final do século XIX as potencias navais estavam a beira de uma Grande Guerra.
Em um momento tenso no cenário mundial, o imperialismo reinante na época ameaçava invadir e subverter nações mais frágeis usando Grandes frotas com armadas de navios pesados.
Nikola Tesla era um pacifista, e estava preocupado com as ameaças de guerra.
Na tentativa de por fim as guerras, em 1898 Nikola Tesla propôs Transformar seu Barco Controle Remoto sem Fio com torpedo potentes e precisos afim de inutilizar as armadas invasoras imperialistas.
Assim, frágeis países poderiam se defender, pondo fim as guerras.
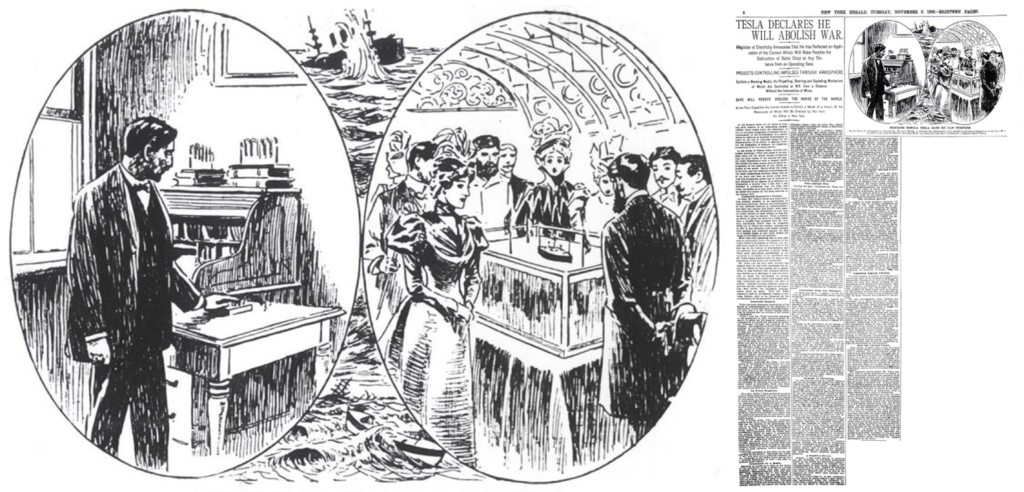
Acerca da proposta de Nikola Tesla de utilizar seu Barco de controle remoto sem fio com torpedos defensivos para países frágeis, o Jornal New York Herald em 8 de novembro de 1898 fez uma Reportagem com 6 paginas:
“No momento em que o mundo inteiro está agitado com rumores de um conflito colossal iminente, vem do laboratório de um dos grandes mágicos da ciência o anúncio do desenvolvimento de um poder que ele acredita estar destinado a inaugurar imediatamente a era da paz universal pela demonstração de sua capacidade de destruir, sem possibilidade de defesa, os armamentos mais poderosos de todas as potências navais.” (Jornal New York Herald, 8 de novembro de 1898)
Na reportagem de 6 paginas Jornal New York Herald, de 1898 Nikola Tesla expressa sua ideia pacificadora a partir de sua invenção:
“A guerra deixará de ser possível quando todo o mundo souber amanhã que a mais fraca das nações pode se abastecer imediatamente com uma arma que tornará sua costa segura e seus portos inexpugnáveis aos ataques das armadas unidas do mundo. Navios de batalha deixarão de ser construídos, e os mais poderosos blindados e a mais tremenda artilharia a bordo não serão mais úteis do que tanto ferro-velho. E esse poder irresistível pode ser exercido a qualquer distância por uma agência de qualidade tão delicada e tão impalpável que sinto que estou justificado em prever que chegará o tempo, por incrível que pareça, em que ele poderá ser chamado à ação pelo mero exercício da vontade humana.”
(Entrevista de Nikola Tesla ao Jornal New York Herald, em 8 de novembro de 1898)
Nikola Tesla revelou em seu aniversario em 1930 que a ideia de sugerir a construção de armas universais a partir de suas invenções foi um dos maiores erros da vida dele. Reconhecendo que não contribuiria em nada para a paz mundial. Sendo contrários ao seu pensamento pacifista.
▶️ Inscreva-se no Canal Nature & Space: Videos Novos nas PlayLists Todo Dia!

Vídeo 1 : Nikola Tesla Projetou Veículo Aéreo Precursor dos Vtols – 1921
LEIA MAIS
Sonho de Nikola Tesla: Experimento Guiou Eletricidade no Ar Usando Som
MAIS DO QUE DIRIGÍVEL: PLATAFORMA AEROSTÁTICA TERMO-LASTREADA DE CARGA PESADA
Compartilhar é Livre. Ajude-nos Citando o Link Deste Artigo!
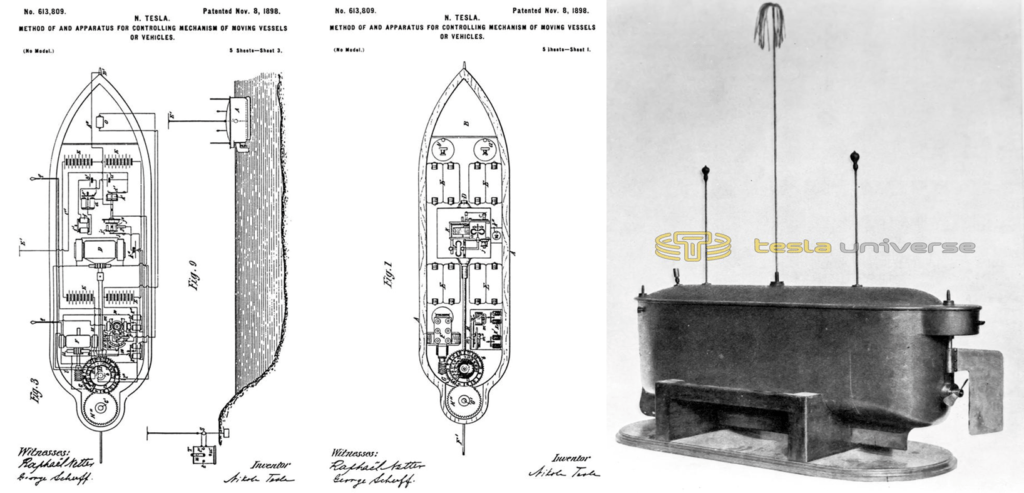
Seguem Desenhos e texto na Integra da Patente de Nikola Tesla de 1898, nº 613809, de seu Barco Controle Remoto sem fio
NIKOLA TESLA PATENTE DOS EUA 613.809 – 1898- MÉTODO E APARELHO PARA MECANISMO DE CONTROLE DE VEÍCULO OU VEÍCULOS EM MOVIMENTO
ESCRITÓRIO DE PATENTES DOS ESTADOS UNIDOS.
NIKOLA TESLA, DE NOVA IORQUE, NY, 1898
MÉTODO E APARELHO PARA MECANISMO DE CONTROLE DE EMBARCAÇÕES OU VEÍCULOS EM MOVIMENTO.
ESPECIFICAÇÃO que faz parte da Carta Patente nº 613.809, datada de 8 de novembro de 1898.
Pedido depositado em 1º de julho de 1898. Número de série 684.934. (Sem modelo.)
Compartilhar é Livre. Ajude-nos Citando o Link Deste Artigo!
A todos a quem possa interessar:
Saiba que eu, N IKOLA T ESLA , cidadão dos Estados Unidos, residente em Nova York, no condado e estado de Nova York, inventei certas melhorias novas e úteis em métodos e aparelhos para controlar à distância o funcionamento dos motores propulsores, dos aparelhos de governo e de outros mecanismos transportados por corpos móveis ou embarcações flutuantes, dos quais o seguinte é uma especificação, fazendo referência aos desenhos que os acompanham e fazem parte dos mesmos.
O problema para o qual a invenção que é objeto do presente pedido proporciona uma solução completa e praticável é o de controlar, a partir de um determinado ponto, a operação dos motores de propulsão, do aparelho de direção e de outros mecanismos transportados por um objeto em movimento, tal como um barco ou qualquer embarcação flutuante, em que os movimentos e o curso de tal corpo ou embarcação podem ser direcionados e controlados à distância e qualquer dispositivo transportado pelo mesmo pode ser acionado a qualquer momento desejado. Tanto quanto sei, as únicas tentativas para resolver este problema que até agora tiveram algum sucesso foram feitas em relação a uma certa classe de embarcações cuja maquinaria era governada por correntes eléctricas transmitidas ao aparelho de controlo através de um dispositivo flexível. condutor; mas este sistema está sujeito a limitações óbvias impostas pelo comprimento, peso e resistência do condutor que pode ser utilizado na prática, pela dificuldade de manter com segurança uma alta velocidade da embarcação ou mudar a direção do movimento do navio. o mesmo com a rapidez desejada, pela necessidade de efetuar o controle a partir de um ponto praticamente fixo e por muitas desvantagens bem compreendidas, inseparavelmente ligadas a tal sistema. O plano que aperfeiçoei não envolve nenhuma dessas objeções, pois estou capacitado, pelo uso de minha invenção, a empregar qualquer meio de propulsão, a transmitir ao corpo ou embarcação em movimento a maior velocidade possível, a controlar a operação de seu maquinário e dirigir os seus movimentos a partir de um ponto fixo ou de um corpo que se move e mudar de direcção, por mais rápido que seja, e manter este controlo ao longo de grandes distâncias, sem quaisquer ligações artificiais entre a embarcação e o aparelho que governa os seus movimentos e sem as restrições que estas devem necessariamente impor.
Em um sentido amplo, então, minha invenção difere de todos os sistemas que fornecem o controle do mecanismo transportado por um objeto em movimento e governando seu movimento, pois não necessito de fios intermediários, cabos ou outra forma de conexão elétrica ou mecânica. com o objeto salve a mídia natural no espaço. Consigo, no entanto, resultados semelhantes e de uma maneira muito mais prática, produzindo ondas, impulsos ou radiações que são recebidas através da terra, da água ou da atmosfera por aparelhos adequados no corpo em movimento e causam as ações desejadas, desde que o corpo permanece dentro da região ativa ou faixa efetiva de tais correntes, ondas, impulsos ou radiações.
Os muitos e difíceis requisitos do objeto aqui contemplado, envolvendo meios peculiares para transmitir a uma distância considerável uma influência capaz de causar de maneira positiva e confiável essas ações, exigiram o projeto de dispositivos e aparelhos de um tipo novo, a fim de utilizar para a melhor vantagem vários fatos ou resultados, que, através de minhas próprias investigações ou de outros, foram tornados praticamente disponíveis.
Quanto à parte da minha invenção que envolve a produção de ondas ou variações adequadas e o transporte das mesmas para um aparelho receptor remoto capaz de ser operado ou controlado por sua influência, ela pode ser realizada de várias maneiras, que estão no tempo presente mais ou menos compreendido. Por exemplo, I pode passar através de um caminho condutor, de preferência envolvendo uma grande área, uma corrente que varia rapidamente e, por indução eletromagnética da mesma, afetar um circuito transportado pelo corpo em movimento. Neste caso, a ação a uma determinada distância será tanto mais forte quanto maior for a área delimitada pelo condutor e maior for a taxa de variação da corrente. Se estes últimos fossem gerados de forma normal, a taxa de mudança e, consequentemente, a distância a que a acção estaria praticamente disponível para o presente objectivo, seriam muito pequenas; mas adotando os meios que desenvolvi – isto é, passando pelas correntes condutoras de um alternador de alta frequência especialmente projetado ou, melhor ainda, pelas de um condensador fortemente carregado – uma taxa de variação muito alta pode ser obtido e o alcance efetivo da influência assim estendido sobre uma vasta área, e ajustando cuidadosamente o circuito no corpo em movimento de modo a estar em sincronismo eletromagnético exato com os distúrbios primários, esta influência pode ser utilizada a grandes distâncias.
Outra forma de realizar minha invenção é direcionar as correntes ou descargas de uma máquina ou condensador de alta frequência através de um circuito cujo terminal esteja conectado diretamente, ou indutivamente, ao terra e o outro a um corpo, de preferência de grande superfície e em uma elevação. Neste caso, se o circuito no corpo móvel for disposto de forma semelhante ou conectado, diferenças de potencial nos terminais do circuito, por condução ou indução eletrostática, serão produzidas e o mesmo objetivo será alcançado. Novamente, para garantir a melhor ação, o circuito receptor deve ser ajustado de modo a estar em sincronismo eletromagnético com a fonte primária, como antes; mas neste caso será entendido pelos especialistas na técnica que se o número de vibrações por unidade de tempo for o mesmo, o circuito deverá agora ter um comprimento de condutor apenas metade daquele usado no primeiro caso.
Ainda outra maneira é passar as correntes simplesmente através do solo, conectando ambos os terminais da fonte de correntes de alta frequência à terra em pontos diferentes e remotos e utilizar as correntes que se espalham pelo solo para afetar um circuito receptor devidamente colocado e ajustado. Novamente, neste caso, se apenas um dos terminais do circuito receptor for conectado ao terra, sendo o outro terminal isolado, o ajuste quanto ao sincronismo com a fonte exigirá que, sob condições iguais, o comprimento do fio seja metade de aquele que seria utilizado se ambos os terminais estivessem conectados ou, geralmente, se o circuito tivesse a forma de circuito fechado ou bobina. Obviamente também neste último caso a posição relativa dos circuitos de recepção e transmissão é importante, ao passo que se o circuito for do primeiro tipo – isto é, aberto – a posição relativa dos circuitos é, em regra, de pouca ou nenhuma importância. consequência.
Finalmente, posso aproveitar-me, na execução da minha invenção, de oscilações elétricas que não seguem nenhum caminho condutor específico, mas se propagam em linhas retas através do espaço, de raios, ondas, pulsos ou perturbações de qualquer tipo, capazes de trazer o mecanismo do corpo em movimento em ação à distância e à vontade do operador por seu efeito sobre dispositivos de controle adequados.
Compartilhar é Livre. Ajude-nos Citando o Link Deste Artigo!
▶️ Inscreva-se no Canal Nature & Space: Videos Novos nas PlayLists Todo Dia!
Vídeo 2: Passando Através -Passing Through. Nikola Tesla, Franklin Institute,1893. Leg Pt Br | Nature & Space
Na descrição detalhada que se segue, limitar-me-ei a uma explicação apenas daquele método e aparelho que considero mais prático e eficaz; mas obviamente minha invenção, em suas características gerais, não se limita aos modos e dispositivos especiais que desenvolvi e descreverei aqui.
Em qualquer caso – isto é, qualquer um dos planos acima ou semelhantes que eu possa adotar – e particularmente quando a influência exercida à distância sobre o circuito receptor for muito pequena para afetar e acionar direta e confiavelmente o aparelho de controle, utilizo auxiliares relés sensíveis ou, em geral, meios capazes de serem acionados pelas influências mais débeis, a fim de efetuar o controle dos movimentos do corpo distante com o menor gasto possível de energia e na maior distância praticável, ampliando assim o alcance e utilidade da minha invenção.
Uma grande variedade de dispositivos elétricos e outros, mais ou menos adequados para o propósito de detectar e utilizar ações fracas, são agora bem conhecidos dos cientistas e artesãos e não precisam ser todos enumerados aqui. Limitando-me apenas ao elétrico como o mais praticável de tais meios e referindo-me apenas àqueles que, embora não sejam os mais sensíveis, estão talvez mais facilmente disponíveis a partir do conhecimento mais geral que existe sobre eles, posso afirmar que um artifício pode ser usado que há muito é conhecido e usado como pára-raios em conexão com placas de comutação telefônica para operar anunciadores e dispositivos semelhantes, compreendendo uma bateria cujos pólos estão conectados a dois terminais condutores separados por uma minúscula espessura de dielétrico. A força eletromotriz da bateria deve ser tal que deforme a fina camada dielétrica quase ao ponto de quebrar, a fim de aumentar a sensibilidade. Quando uma perturbação elétrica atinge um circuito assim disposto e ajustado, uma tensão adicional é aplicada à película isolante, que cede e permite a passagem de uma corrente que pode ser utilizada para operar qualquer forma de aparelho de controle de circuito.
Novamente, outro dispositivo capaz de ser utilizado na detecção de efeitos elétricos fracos consiste em duas placas condutoras ou terminais que têm, preferencialmente, fios de algum comprimento presos a eles e são ligados por uma massa de partículas minúsculas de metal ou outro material condutor. Normalmente, essas partículas soltas não conectam as placas de metal; mas sob a influência de uma perturbação elétrica produzida à distância, evidentemente devido à atração eletrostática, elas são pressionadas firmemente uma contra a outra, estabelecendo assim uma boa conexão elétrica entre os dois terminais. Essa mudança de estado pode ser usada de várias maneiras para o propósito acima.
Ainda outro dispositivo modificado, que pode ser dito incorporar as características de ambos os primeiros, é obtido conectando as duas placas condutoras ou terminais acima referidos permanentemente com os polos de uma bateria que deve ser de força eletromotriz muito constante. Neste arranjo, uma perturbação elétrica distante produz um efeito duplo nas partículas condutoras e películas isolantes entre elas. As primeiras são trazidas mais próximas uma da outra em consequência do aumento repentino da atração eletrostática, e as últimas, devido a isso, bem como por serem reduzidas em espessura ou em número, são submetidas a uma tensão muito maior, que elas são incapazes de suportar.
Compartilhar é Livre. Ajude-nos Citando o Link Deste Artigo!
Será obviamente notado pelo precedente que qualquer um desses ou similares dispositivos usados, a sensibilidade e, o que é frequentemente ainda mais importante, a confiabilidade da operação é muito materialmente aumentada por um ajuste próximo dos períodos de vibração dos circuitos de transmissão e recepção, e, embora tal ajuste seja em muitos casos desnecessário para a execução bem-sucedida da minha invenção, eu, no entanto, estabeleço como regra conceder a esta característica o maior cuidado possível, não apenas por causa das vantagens acima mencionadas, que são garantidas pela observância das condições mais favoráveis a este respeito, mas também e principalmente com o objetivo de evitar que o circuito de recepção seja afetado por ondas ou perturbações emanadas de fontes não sob o controle do operador. Quanto mais estreita for a faixa de vibrações que ainda são capazes de afetar perceptivelmente o circuito de recepção, mais seguro este último será contra perturbações estranhas. Para garantir o melhor resultado, é necessário, como é bem conhecido pelos especialistas, construir o circuito receptor ou aquela parte do mesmo em que a vibração ocorre principalmente para que tenha a maior autoindução possível e, ao mesmo tempo, a menor resistência possível. Desta maneira, demonstrei a praticabilidade de fornecer um grande número de tais circuitos receptores — cinquenta ou cem, ou mais — cada um dos quais pode ser chamado ou colocado em ação sempre que desejado sem que os outros sejam interferidos. Este resultado torna possível para um operador direcionar simultaneamente os movimentos de vários corpos, bem como controlar a ação de vários dispositivos localizados no mesmo corpo, cada um dos quais pode ter uma função distinta a cumprir. Na descrição a seguir, no entanto, mostrarei um desenvolvimento ainda maior nesta direção — a saber, como, ao fazer uso de apenas um circuito receptor, uma grande variedade de dispositivos pode ser acionada e qualquer número de funções diferentes executadas à vontade e comando do operador distante.
Deve ser declarado antecipadamente em relação aos dispositivos sensíveis acima mencionados, que podem ser amplamente considerados como pertencentes a uma classe, na medida em que a operação de todos eles envolve a quebra de uma espessura minúscula de dielétrico altamente tensionado, que é necessário fazer alguma provisão para restaurar automaticamente ao dielétrico suas qualidades isolantes originais e intactas para permitir que o dispositivo seja usado em operações sucessivas. Isso geralmente é realizado por uma batida suave ou vibração dos eletrodos ou partículas ou rotação contínua dos mesmos; mas em longa experiência com muitas formas desses dispositivos, descobri que tais procedimentos, embora adequados em operações simples e comparativamente sem importância, como sinalização comum, quando é meramente necessário que os efeitos subsequentes produzidos no circuito receptor sejam diferentes em relação à sua duração relativa apenas, caso em que é de pouca ou nenhuma consequência se alguns dos efeitos individuais forem alterados ou incompletos ou mesmo totalmente perdidos, não produzem resultados satisfatórios em muitos casos, quando pode ser muito importante que os efeitos produzidos sejam todos exatamente como desejado e que nenhum falhe. Para ilustrar, suponhamos que um oficial que dirige os movimentos de uma embarcação da maneira descrita deve achar necessário colocar em ação um dispositivo especial na última ou executar uma operação específica, talvez de momento vital, em um aviso instantâneo e possivelmente quando, por projeto ou acidente, a própria embarcação ou qualquer marca indicando sua presença estiver escondida de sua vista. Neste caso, uma falha ou ação defeituosa de qualquer parte do aparelho pode ter consequências desastrosas e tais casos em que o funcionamento seguro e oportuno da maquinaria é de suma importância podem frequentemente se apresentar na prática, e esta consideração me impressionou com a necessidade de acabar com os defeitos nos dispositivos e procedimentos atuais e de produzir um aparelho que, embora seja sensível, também seja mais confiável e positivo em sua ação. No arranjo descrito a seguir, esses defeitos são superados de uma maneira mais satisfatória, permitindo que milhares de operações sucessivas, em todos os aspectos, sejam executadas pelo aparelho de controle sem uma única irregularidade ou falha sendo registrada. Para uma melhor compreensão destes e de outros detalhes da invenção, conforme os realizo agora, gostaria de consultar os desenhos anexos, nos quais—
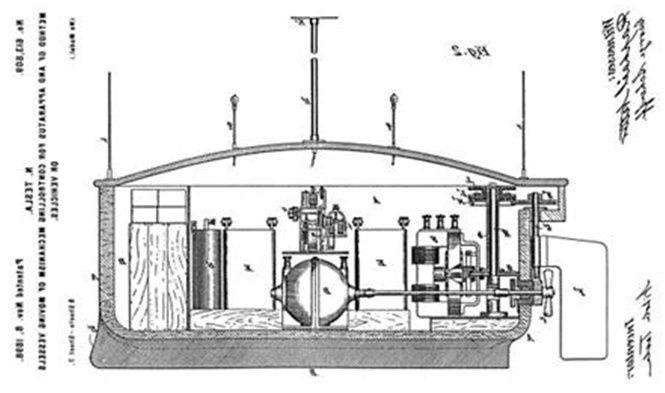
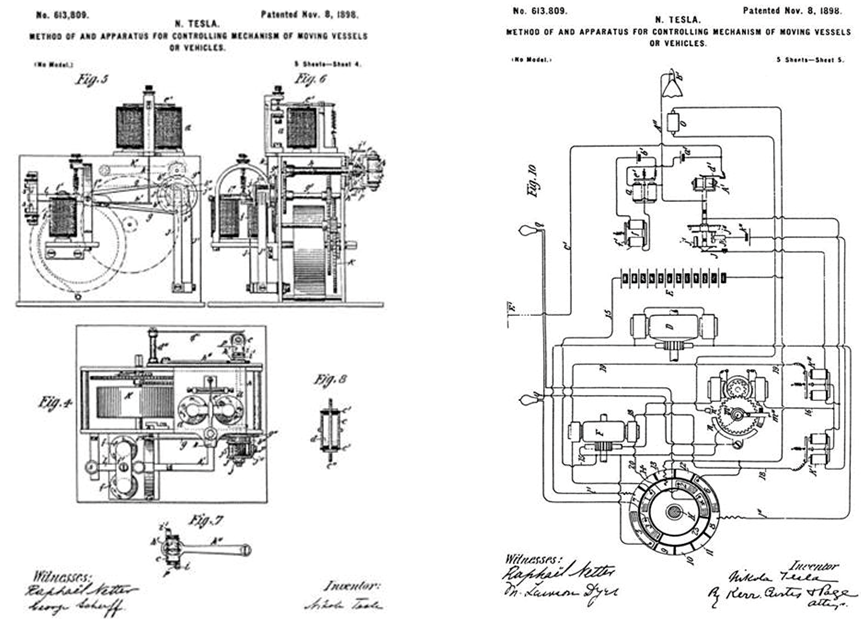
A Figura 1 é uma vista em planta de um vaso e mecanismo dentro do mesmo. A Figura 2 é uma seção longitudinal do mesmo, mostrando o mecanismo interno em elevação lateral. A Figura 3 é uma vista em planta, parcialmente diagramática, do vaso, aparelho e conexões de circuito do mesmo. A Figura 4 é uma vista em planta, em escala ampliada, de uma parte do mecanismo de controle. A Figura 5 é uma vista final do mesmo. A Figura 6 mostra o mesmo mecanismo em elevação lateral. A Figura 7 é uma vista lateral de um detalhe do mecanismo. A Figura 8 é uma vista seccional central, em escala maior, de um dispositivo sensível que faz parte do circuito receptor. A Figura 9 é uma ilustração diagramática do sistema em sua forma preferida. A Figura 10 é uma vista dos vários mecanismos empregados, mas em escala maior, e deixando de fora ou indicando convencionalmente certas partes de caráter bem compreendido.
Referindo-se às Figuras 1 e 2, A designa qualquer tipo de embarcação ou veículo que seja capaz de ser impulsionado e direcionado, como um barco, um balão ou uma carruagem. Pode ser projetado para transportar em um compartimento adequado B objetos de qualquer tipo, de acordo com a natureza dos usos aos quais deve ser aplicado. A embarcação — neste caso, um barco — é provida de maquinário de propulsão adequado, que é mostrado como compreendendo uma hélice de parafuso C, presa ao eixo de um motor eletromagnético D, que deriva sua energia de baterias de armazenamento EEE E. Além do motor de propulsão ou motor, o barco também carrega um pequeno motor de direção F, cujo eixo é estendido além de seus mancais e provido de um sem-fim que engrena com uma roda dentada G. Esta última é fixada a uma luva b , livremente móvel em uma haste vertical H, e é girada em uma ou outra direção, de acordo com a direção de rotação do motor F.
A manga b na haste H é engrenada através das rodas dentadas H ‘ e H ” , com um fuso G, montado em mancais verticais na proa do barco e suportando o leme F ‘ .
O aparelho por meio do qual a operação do mecanismo de propulsão e direção é controlada envolve, principalmente, um circuito receptor, que, pelas razões antes mencionadas, é preferencialmente ajustado e tornado sensível à influência de ondas ou impulsos que emanam de uma fonte remota, sendo o ajuste feito de modo que o período de oscilação do circuito seja o mesmo que o da fonte ou um harmônico deste.
O circuito receptor propriamente dito (diagramaticamente mostrado nas Figs. 3 e 10) compreende o terminal E ‘ , o condutor C ‘ , um dispositivo sensível A ‘ , e um condutor A ” , levando ao solo convenientemente através de uma conexão com a quilha de metal B ‘ da embarcação. O terminal E ‘ deve apresentar uma grande superfície condutora e deve ser suportado tão alto quanto praticável em um D ‘ padrão , que é mostrado como quebrado na Fig. 2; mas tais provisões nem sempre são necessárias. É importante isolar muito bem o condutor C ‘ de qualquer maneira que ele seja suportado.
Compartilhar é Livre. Ajude-nos Citando o Link Deste Artigo!
O circuito ou caminho mencionado acima também faz parte de um circuito local, que inclui um relé-ímã a e uma bateria a ‘ , cuja força eletromotriz é, como explicado anteriormente, tão determinada que, embora as camadas dielétricas no dispositivo sensível A ‘ sejam submetidas a uma grande tensão, normalmente elas suportam a tensão e nenhuma corrente apreciável flui através do circuito local; mas quando uma perturbação elétrica atinge o circuito, as películas dielétricas são quebradas, a resistência do dispositivo A ‘ é repentina e grandemente diminuída, e uma corrente atravessa o relé-ímã A.
O dispositivo sensível particular empregado é mostrado em vistas gerais e em detalhes nas Figuras 4, 6, 7 e 8. Ele consiste em um cilindro de metal c , com cabeças isolantes c ‘ , através das quais passa uma haste metálica central c ” . Uma pequena quantidade de grãos d de material condutor, como um metal oxidado, é colocada no cilindro. Uma tira metálica d ‘ , presa a um poste isolado d ” , encosta na lateral do cilindro c , conectando-o ao condutor C ‘ , formando uma parte do circuito. A haste central c ” é conectada à estrutura do instrumento e assim à outra parte do circuito através do braço metálico bifurcado e , cujas extremidades são fixadas com duas porcas às extremidades salientes da haste, por meio das quais o cilindro c é suportado.
Para interromper o fluxo de corrente da bateria que é iniciado pela ação do dispositivo sensível A ‘ , meios especiais são fornecidos, que são os seguintes: A armadura e ‘ do ímã a , quando atraída por este último, fecha um circuito contendo uma bateria b ‘ e um ímã f . A alavanca da armadura f ‘ deste ímã é fixada a um eixo de rocha f ” , ao qual é fixado um escape de âncora g , que controla os movimentos de um fuso g ‘ , acionado por um trem de relógio K. O fuso g ‘ tem fixado a ele um disco g ” com quatro pinos b ” , de modo que para cada oscilação do escape g o fuso g ‘ é girado por um quarto de revolução. Um dos fusos no trem de relógio, como h , é engrenado de modo a fazer metade de uma revolução para cada quarto de revolução do fuso g ‘ . A extremidade do fuso anterior se estende pela lateral da estrutura e carrega um cilindro excêntrico h ‘ , que passa por uma ranhura em uma alavanca h ” , articulada para a lateral da estrutura. O braço bifurcado e , que suporta o cilindro c , é articulado para a extremidade do excêntrico b ‘ , e o excêntrico e o dito braço são conectados por uma mola espiral l . Dois pinos i’i ‘ se estendem para fora da alavanca h ” , e um deles está sempre no caminho de uma projeção no braço e . Eles operam para evitar o giro do cilindro c com o fuso h e o excêntrico. Será evidente que uma meia-revolução do fuso h enrolará a mola i e ao mesmo tempo levantará ou abaixará a alavanca h ” , e essas partes são dispostas de modo que, pouco antes da meia-revolução do fuso ser concluída, o pino i ‘ , em engate com a projeção ou pino de parada p , é retirado de seu caminho, e o cilindro c , obedecendo à força da mola i , é repentinamente girado de ponta a ponta, seu movimento sendo verificado pelo outro pino i ‘ .O ajuste relativamente à armadura f’ do ímã f é, além disso, feito de modo que o pino i ‘ seja retirado no momento em que a armadura quase atingiu sua posição extrema em sua aproximação em direção ao ímã — isto é, quando a alavanca l , que carrega a armadura f ‘ , quase toca o inferior dos dois batentes ss , Fig. 5 — o que limita seu movimento em ambas as direções.
O arranjo que acabamos de descrever foi o resultado de uma longa experimentação com o objetivo de superar certos defeitos em dispositivos desse tipo, aos quais já se fez referência antes. Descobri que esses defeitos são devidos a muitas causas, como o tamanho, peso e formato desiguais dos grãos, a pressão desigual que resulta disso e da maneira como os grãos são geralmente agitados, a falta de uniformidade na condutividade da superfície das partículas devido à espessura variável da camada oxidada superficial, a condição variável do gás ou atmosfera em que as partículas estão imersas e a certas deficiências, bem conhecidas pelos especialistas, do aparelho transmissor como empregado até então, que são em grande medida reduzidas pelo uso de minhas bobinas de alta frequência aprimoradas. Para acabar com os defeitos no dispositivo sensível, preparo as partículas de modo que sejam em todos os aspectos o mais parecidas possível. Eles são fabricados por uma ferramenta especial, assegurando sua igualdade em tamanho, peso e forma, e são então uniformemente oxidados colocando-os por um tempo determinado em uma solução ácida de força predeterminada. Isso assegura a condutividade igual de suas superfícies e interrompe sua deterioração posterior, evitando assim uma mudança no caráter do gás no espaço em que estão encerrados. Prefiro não rarefazer a atmosfera dentro do dispositivo sensível, pois isso tem o efeito de tornar o primeiro menos constante em relação às suas propriedades dielétricas, mas apenas assegurar um invólucro hermético das partículas e rigorosa ausência de umidade, o que é fatal para o funcionamento satisfatório.
A posição normal do cilindro c é vertical e, quando girado da maneira descrita, os grãos nele contidos são simplesmente deslocados de uma extremidade para a outra; mas, como eles sempre caem pelo mesmo espaço e são submetidos à mesma agitação, eles são levados, após cada operação do relé, precisamente à mesma condição elétrica e oferecem a mesma resistência ao fluxo da corrente da bateria até que outro impulso de longe atinja o circuito receptor.
O relé-ímã a deve ser de tal caráter que responda a uma corrente muito fraca e ainda assim seja positivo em sua ação. Para garantir a retração de sua armadura e ‘ após a corrente ter sido estabelecida através do ímã f e interrompida pela inversão do dispositivo sensível c , uma haste leve k é suportada em guias na estrutura em posição para ser levantada por uma extensão k ‘ da alavanca da armadura l e para levantar ligeiramente a armadura e . Como uma corrente fraca pode fluir normalmente através do dispositivo sensível e do relé-ímã a , o que seria suficiente para segurar, mas não puxar a armadura para baixo, é bom observar esta precaução.
A operação do relé-ímã a e a consequente operação do eletroímã f , como descrito acima, são utilizadas para controlar a operação do motor propulsor e do aparelho de direção da seguinte maneira: No fuso g ‘ , que carrega o disco de escape g ” , Figs. 4 e 6, há um cilindro j de material isolante com uma placa ou cabeça condutora em cada extremidade. A partir dessas duas cabeças, respectivamente, placas de contato ou segmentos j ‘ j ” se estendem em lados diametralmente opostos do cilindro. A placa j ” está em conexão elétrica com a estrutura do instrumento através da cabeça da qual se estende, enquanto tiras ou escovas isoladas JJ ‘ repousam sobre a extremidade livre ou cabeça do cilindro e a periferia do mesmo, respectivamente. Assim, são fornecidos três terminais, um sempre em conexão com a placa j ‘ , o outro sempre em conexão com a placa j ” , e o terceiro adaptado para repousar nas tiras j ‘ e j ” em sucessão ou sobre os espaços isolantes intermediários, de acordo com a posição em que o comutador é trazido pelo trem de relógio e pelo escapamento de âncora g .
K ‘ K ” , Figs. 1, 3 e 10, são dois relés magnéticos convenientemente colocados na parte traseira do motor propulsor. Um terminal de uma bateria k ” é conectado a uma extremidade de cada uma das bobinas do relé, o terminal oposto à escova J ‘ , e as extremidades opostas das bobinas do relé à escova J e à estrutura do instrumento, respectivamente. Como consequência desse arranjo, o relé K ‘ ou K ” será energizado quando a escova J ‘ repousa sobre a placa j ‘ ou j ” , respectivamente, ou ambos os relés ficarão inativos enquanto a escova J ‘ repousa sobre um espaço isolante entre as placas j ‘ e j ” . Enquanto um relé, como K ‘ , é energizado, sua armadura fecha um circuito através do motor F, que é girado em uma direção para lançar o leme para bombordo. Por outro lado, quando o relé K ” está ativo, outro circuito através do motor F é fechado, o que inverte sua direção de rotação e desloca o leme para estibordo. Esses circuitos, no entanto, são utilizados ao mesmo tempo para outros propósitos, e seu curso é, em parte, feito por meio de aparelhos que descreverei antes de traçar seu curso.
A haste fixa H carrega um disco isolante ou cabeça L, Fig. 2, na parte inferior da qual estão fixadas seis escovas, 1, 2, 3, 4, 5 e 6, Fig. 3. A luva b , que envolve a haste e é girada pelo motor de direção F, carrega um disco L ‘ , sobre a face superior do qual estão dois círculos concêntricos de placas de contato condutoras. As escovas 1, 2, 3 e 4 repousam sobre o círculo interno de contatos, enquanto as escovas 5 e 6 repousam sobre o círculo externo de contatos. O círculo externo de contatos compreende duas placas longas 7 e 8 em lados opostos do disco e uma série de placas mais curtas 9, 10, 11, 12, 13 e 14 na frente e atrás. Condutores flexíveis l ‘ l ” conectam as placas 7 e 8 com os terminais do motor de propulsão D, e os polos da bateria principal E são conectados às escovas 5 e 6, respectivamente, de modo que enquanto o leme está reto ou virado para cima em um certo ângulo para cada lado, a corrente é transportada através das escovas 5 e 6 e segmentos 7 e 8 para o motor de propulsão D. O motor de direção F também é acionado pela corrente retirada da bateria principal E da seguinte maneira: Um condutor 15 de um polo da bateria leva a uma das escovas do comutador, e da outra escova corre um condutor 16 para um dos contatos de cada relé K ‘ K ” . Quando um desses relés, como K ” , está ativo, ele continua esse circuito através de um fio 19 através de uma bobina de campo ou conjunto de bobinas no motor F e daí para a escova 1. De maneira semelhante, quando o outro relé K ‘ está ativo, o circuito é continuado do fio 18 através de um fio 20, o segundo ou conjunto de bobinas de campo reversíveis, e para a escova 2.
Compartilhar é Livre. Ajude-nos Citando o Link Deste Artigo!
Ambas as escovas 1 e 2, em todos os momentos em que o leme não é girado mais do que cerca de quarenta e cinco graus para um lado, estão em contato com uma longa placa condutora 21, e uma escova em qualquer posição do leme está sempre em contato com a referida placa, e esta última é conectada por um condutor flexível 22 com o polo oposto da bateria principal. Portanto, o motor F pode sempre ser causado a girar em uma direção, qualquer que seja a posição do leme, e pode ser causado a girar em qualquer direção sempre que a posição do leme for menor do que um ângulo predeterminado, convenientemente quarenta e cinco graus da posição central. No entanto, para evitar que o leme seja girado muito longe em qualquer direção, a placa isolada 23 é usada. Qualquer movimento do leme além de um limite predeterminado traz esta placa sob uma ou outra das escovas I 2 e interrompe o circuito do motor F, de modo que o leme não pode ser conduzido mais longe naquela direção, mas, como será entendido, o aparelho está em condições de virar o leme para o outro lado. Da mesma forma, o circuito do motor propulsor D é controlado através das escovas 5 e 6 e dos segmentos no círculo externo de contatos da cabeça L. Se os segmentos curtos em ambos os lados do círculo estiverem isolados, o motor D será parado sempre que uma das escovas 5 ou 6 passar para um deles a partir dos segmentos maiores 7 e 8.
É importante acrescentar que em todos os pontos de contato onde ocorre uma ruptura, deve-se tomar providências para superar a faísca e evitar a oscilação de cargas elétricas nos circuitos, pois tais faíscas e oscilações podem afetar o dispositivo sensível. É essa consideração principalmente que torna aconselhável usar os dois relés K ‘ K ” , que de outra forma poderiam ser dispensados. Eles também devem ser colocados o mais longe possível do dispositivo sensível para protegê-lo contra qualquer ação de fortes correntes variáveis.
Além do mecanismo descrito, a embarcação pode transportar quaisquer outros dispositivos ou aparelhos que possam ser necessários para realizar qualquer objeto especial de maior ou menor importância. A título de ilustração, um pequeno motor m é mostrado, Figuras 1 e 3, que serve convenientemente para uma série de propósitos. Este motor é mostrado conectado em série com a armadura do motor de direção F, de modo que sempre que qualquer um dos circuitos deste último for fechado através dos relés K ‘ K ” o motor m é igualmente girado, mas em todos os casos na mesma direção. Sua rotação é oposta por uma mola m ‘ , de modo que em operação normal, devido ao fato de que os circuitos do motor F são fechados por um curto período de tempo, a alavanca m ” , que é fixada a uma das rodas do mecanismo de relógio M, com a qual a armadura do motor é engrenada, se moverá por uma curta distância e, após a cessação da corrente, retornará a uma parada P; mas se os circuitos do motor F forem fechados e abertos rapidamente em sucessão, operação que deixa o leme inalterado, então a alavanca m ” é movida para um ângulo maior, entrando em contato com uma placa de metal n , e finalmente, se desejado, com um poste n ‘ . Após a alavanca m ” entrar em contato com a placa n a corrente da bateria principal passa por uma ou outra ou ambas as luzes suportadas em padrões qq , de acordo com a posição das escovas 3 e 4 relativamente ao segmento isolante 23; mas como a cabeça L, carregando os segmentos, é engrenada no leme, a posição deste último é de forma geral determinada pela observação das luzes. Ambas as luzes podem ser coloridas e, piscando-as sempre que desejado, o operador pode guiar a embarcação à noite em seu curso. Para tais propósitos também são fornecidos os padrões rr , que devem ser pintados em cores vivas, de modo a serem visíveis durante o dia a grandes distâncias. Ao abrir e fechar os circuitos do motor F um número maior de vezes, preferencialmente determinado de antemão, a alavanca m ” é colocada em contato com o poste n ‘ , fechando assim o circuito da bateria principal através de um dispositivo o e colocando este último em ação no momento desejado. Por meio de dispositivos semelhantes ou como aqueles que prontamente se sugerirão aos mecânicos, qualquer número de dispositivos diferentes pode ser operado.
Referindo-se agora à Fig. 9, que ilustra diagramáticamente o sistema como praticado ao direcionar os movimentos de um barco, nesta figura S designa qualquer fonte de perturbação elétrica ou oscilações cuja geração é controlada por um interruptor adequado contido na caixa T. A alavanca do interruptor é móvel em apenas uma direção e para em quatro pontos tt ‘ uu ‘ , de modo que, à medida que a alavanca passa de parada em parada, oscilações são produzidas pela fonte durante um intervalo de tempo muito curto. São produzidas, portanto, quatro perturbações durante uma revolução e o circuito receptor é afetado quatro vezes; mas será entendido pela descrição anterior dos dispositivos de controle na embarcação que o leme será movido duas vezes, uma para a direita e uma para a esquerda. Agora, prefiro colocar a alavanca do interruptor de modo que, quando ela for presa nos pontos tt ‘ — isto é, à direita ou à esquerda do operador — ele seja lembrado de que a embarcação está sendo desviada para a direita ou à esquerda de seu curso, por meio do qual o controle é facilitado. As posições normais da manivela são, portanto, em uu ‘ quando o leme não é acionado, e ele permanece nos pontos uu ‘ somente enquanto necessário. Uma vez que, como dito antes, o funcionamento do aparelho é muito seguro, o operador é capaz de executar quaisquer operações conforme a provisão é feita sem nem mesmo ver a embarcação.
A maneira de usar o aparelho e a operação dos vários instrumentos que o compõem é detalhada como segue: Normalmente a placa L ‘ é girada de modo que a escova 2 repouse sobre o segmento isolado 23 e a escova 6 sobre um dos segmentos curtos isolados na parte traseira do círculo. Sob essas condições, o leme será girado para estibordo e o circuito do motor D interrompido entre as escovas 5 e 6. Ao mesmo tempo, apenas um dos circuitos do motor F — aquele controlado pelo relé K ‘ — é capaz de ser fechado, uma vez que a escova 2, que se conecta com o outro, está fora de contato com o segmento longo 21. Assumindo agora que se deseja dar partida na embarcação e direcioná-la para um determinado ponto, a manivela T é girada de sua posição normal no ponto u ‘ para o ponto t na caixa de interruptores. Isso envia uma perturbação elétrica, que, passando pelo circuito receptor na embarcação, afeta o dispositivo sensível A ‘ e inicia o fluxo de corrente através do circuito local, incluindo o dito dispositivo, o relé a , e a bateria a ‘ . Isso, como foi explicado anteriormente, gira o cilindro j e faz com que a escova J ‘ passe do isolamento para o contato j ‘ . A bateria k ” é então fechada através do relé K ” , e este último fecha aquele circuito do motor F que, começando pela placa 22, que é permanentemente conectada com um polo da bateria principal, é completado através da escova 1, o campo do motor F, fio 19, a armadura do relé K ” , fio 16, o motor m , as escovas e comutador do motor F, e fio 15 para o terminal oposto da bateria E. O motor F é então colocado em operação para deslocar o leme para bombordo; mas o movimento da placa L ‘ que se segue traz a escova 6 de volta para o segmento 8 e fecha o circuito do motor de propulsão que dá partida na embarcação. O motor F é permitido a funcionar até que o leme tenha sido girado o suficiente para dirigir a embarcação na direção desejada, quando a manivela T é girada para o ponto u . Isso produz outra ação do relé a e a escova J ‘ é deslocada para o isolamento e ambos os relés K ‘ e K ” ficam inativos. O leme permanece na posição para a qual foi deslocado pelo motor F. Se for então desejado deslocá-lo para estibordo, ou na direção oposta àquela em que foi movido pela última vez, a manivela T é simplesmente girada para o ponto t ‘e deixado lá até que o motor F, que agora é operado pelo relé K ‘ , cujo circuito é fechado pela tira J ‘ entrando em contato com a placa j ” , tenha feito seu trabalho. O movimento da manivela T para o próximo ponto joga fora ambos os relés K ‘ e K ” , e o próximo movimento causa uma mudança do leme para bombordo, e assim por diante. Suponha, no entanto, que após o leme ter sido ajustado em qualquer ângulo para sua posição intermediária, seja desejado deslocá-lo ainda mais na mesma direção. Nesse caso, a manivela é movida rapidamente sobre dois pontos, de modo que o circuito que moveria o leme na direção oposta é fechado por um intervalo de tempo muito curto para produzir um efeito apreciável e é permitido descansar no terceiro ponto até que o leme seja deslocado para a posição desejada, quando a manivela é movida para o próximo ponto, o que novamente joga fora ambos os relés K ‘ e K ” . Entender-se-á que se a manivela for mantida por um tempo suficientemente longo em qualquer ponto t ou t ‘ o motor F simplesmente girará a placa L ‘ em uma direção ou outra até que os circuitos dos motores D e F sejam interrompidos. É ainda mais evidente que um relé K ‘ ou K ” estará sempre em operação para dar partida no motor F.
Conforme explicado anteriormente, o maior período de operação do qual o motor F é capaz, sob condições normais de uso, não permite que o motor m mova o braço m ‘ para contato com a placa n ; mas se a manivela T for girada com certa rapidez, uma série de impulsos de corrente serão direcionados através do motor m ; mas como estes tendem a girar o motor F em direções opostas, eles não afetam sensivelmente o último, mas agem para girar o motor m contra a força da mola enrolada.
A invenção que descrevi será útil de muitas maneiras. Embarcações ou veículos de qualquer tipo podem ser usados, como barcos salva-vidas, de despacho ou pilotos ou similares, ou para transportar cartas, pacotes, provisões, instrumentos, objetos ou materiais de qualquer descrição, para estabelecer comunicação com regiões inacessíveis e explorar as condições existentes nas mesmas, para matar ou capturar baleias ou outros animais do mar, e para muitos outros propósitos científicos, de engenharia ou comerciais; mas o maior valor da minha invenção resultará de seu efeito sobre a guerra e os armamentos, pois, em razão de sua destrutividade certa e ilimitada, tenderá a trazer e manter a paz permanente entre as nações.
Tendo agora descrito minha invenção, o que eu afirmo é:
1. A melhoria na arte de controlar os movimentos e a operação de uma embarcação ou veículo aqui descrito, que consiste em produzir ondas ou perturbações que são transmitidas à embarcação pelos meios naturais, acionando assim aparelhos adequados na embarcação e efetuando o controle do motor de propulsão, da direção e de outros mecanismos pela operação do referido aparelho, conforme estabelecido.
2. A melhoria na arte de controlar os movimentos e a operação de uma embarcação ou veículo, aqui descrita, que consiste em estabelecer uma região de ondas ou perturbações e acionar, por sua influência exercida à distância, os dispositivos em tal embarcação ou veículo, que controlam a propulsão, a direção e outros mecanismos nele contidos, conforme estabelecido.
3. A melhoria na arte de controlar os movimentos e a operação de uma embarcação ou veículo, aqui descrita, que consiste em estabelecer uma região de ondas elétricas ou perturbações, e acionar por sua influência, exercida à distância, os dispositivos na referida embarcação ou veículo, que controlam a propulsão, direção e outros mecanismos nele, conforme estabelecido.
4. A melhoria na arte de controlar os movimentos e a operação de uma embarcação ou veículo, aqui descrita, que consiste em fornecer na embarcação um circuito que controla a propulsão, a direção e outros mecanismos, ajustando ou tornando tal circuito sensível a ondas ou perturbações de um caráter definido, estabelecendo uma região de tais ondas ou perturbações e tornando por seus meios o circuito de controle ativo ou inativo, conforme estabelecido.
5. A combinação com uma fonte de ondas elétricas ou perturbações de uma embarcação ou veículo em movimento, e mecanismo nele para impulsionar, dirigir ou operar o mesmo, e um aparelho de controle adaptado para ser acionado pela influência das ditas ondas ou perturbações a uma distância da fonte, conforme estabelecido.
6. A combinação com uma fonte de ondas elétricas ou perturbações de uma embarcação ou veículo em movimento, mecanismo para impulsionar, dirigir ou operar o mesmo, um circuito e meios nele contidos para controlar o mecanismo, e meios para tornar o circuito ativo ou inativo através da influência das ondas ou perturbações exercidas a uma distância da fonte, conforme estabelecido.
7. A combinação com uma fonte de ondas elétricas ou perturbações e meios para iniciar e parar a mesma, de uma embarcação ou veículo, mecanismo de propulsão e direção transportado por ela, um circuito contendo ou conectado com meios para controlar a operação do referido mecanismo e ajustado ou tornado sensível às ondas ou perturbações da fonte, conforme estabelecido.
8. A combinação com uma fonte de ondas elétricas ou perturbações, e meios para iniciar e parar a operação da mesma, de uma embarcação ou veículo, mecanismo de propulsão e direção transportado por ela, circuitos locais controlando tais mecanismos, um circuito sensível às ondas ou perturbações da fonte e meios nele adaptados para controlar os ditos circuitos locais, conforme e para a finalidade estabelecida.
9. O dispositivo sensível aqui descrito compreende em construção um receptáculo contendo um material, tal como partículas de metal oxidado formando uma parte do circuito, e meios para girar o mesmo de ponta a ponta quando o material foi tornado ativo pela passagem através dele de uma descarga elétrica, conforme estabelecido.
10. O dispositivo sensível aqui descrito, compreendendo em combinação um receptáculo contendo um material tal como partículas de metal oxidado formando uma parte de um circuito elétrico, um eletroímã em dito circuito, e dispositivos controlados por ele para girar o receptáculo de ponta a ponta quando dito ímã é energizado, conforme estabelecido.
11. O dispositivo sensível aqui descrito, compreendendo em combinação um receptáculo contendo um material tal como partículas de metal oxidado formando parte de um circuito elétrico, um motor para girar o receptáculo, um eletroímã em circuito com o material e um escapamento controlado pelo dito ímã e adaptado para permitir uma meia-revolução do receptáculo quando o dito ímã é energizado, conforme estabelecido.
12. A combinação com um corpo móvel ou veículo, de um motor de propulsão, um motor de direção e contatos elétricos transportados por uma porção móvel do mecanismo de direção, e adaptados em certas posições deste último para interromper o circuito do motor de propulsão, um circuito local e meios conectados a ele para controlar o motor de direção, e um circuito que controla o circuito local e meios para tornar dito circuito de controle sensível à influência de ondas elétricas ou perturbações exercidas a uma distância de sua fonte, conforme estabelecido.
13. A combinação com o motor de direção, um circuito local para direcionar a corrente através do mesmo em direções opostas, um circuito de controle tornado sensível à influência de ondas elétricas ou perturbações exercidas à distância de sua fonte, um motor em circuito com o motor de direção, mas adaptado para funcionar sempre na mesma direção, e um circuito local ou circuitos controlados pelo referido motor, conforme estabelecido.
NIKOLA TESLA. NOVA IORQUE, NY, EUA, 1898
Testemunhas:
RAPHAËL N ETTER ,
G EORGE S CHERFF .
Bibliografia
Curadoria Técnica e Análise Audiovisual: Conteúdo Bibliográfico e Audiovisual Selecionado e Validado por Dr. Sergio Almeida Loiola – CV Lattes/CNPq.
Site Tesla Universe
Tesla Declares He Will Abolish War
New York Herald, November 8th, 1898
Análise Audiovisual
Vídeo 1 Nature & Space: Nikola Tesla Projetou Veículo Aéreo Precursor dos Vtols – 1921
Vídeo 2 Nature & Space: Passando Através -Passing Through. Nikola Tesla, Franklin Institute,1893. Leg Pt Br | Nature & Space
Política de Uso
Compartilhar é Livre. Ajude-nos Citando o Link Deste Artigo!
NIKOLA TESLA E SEU PIONEIRO BARCO CONTROLADO REMOTAMENTE SEM FIO EM 1898

















{kind=link}